This is old material generated around 2016-2017. I’m posting here to archive the material.
The IdeasX system consists of 3 categories of devices:
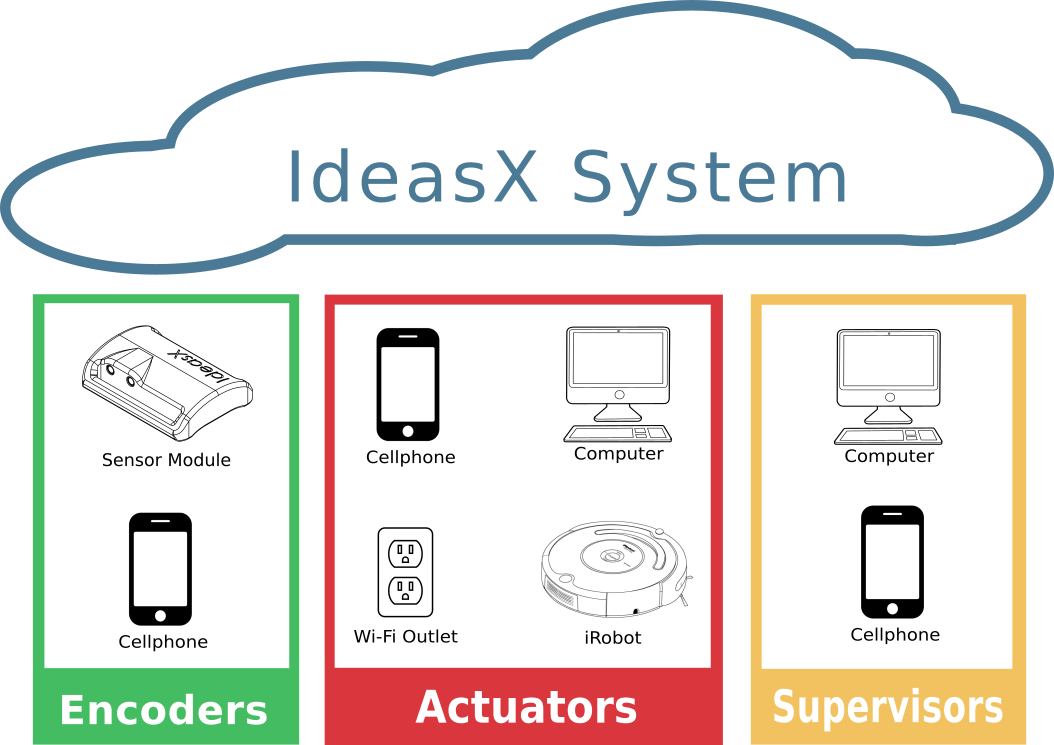
Encoder – Encoders are sensor equipped devices designed to interpret any feedback an individual can provide with the disability. A few examples of feedback is limb movement, EMG, EEG, and respiration. As a device which will basically “live” with the user, encoders need to be light, portable, wireless, and have a long battery life. In addition, change is hard so encoders have to be a breeze to configure and setup.
Current development is focusing on detecting limb movement through the industry standard sensing method (gigantic switches, seriously), and a 3 axis accelerometer / 3 axis gyroscope IMU. IMU stands for inertial measurement unit. The information detected by the encoders is then processed locally and or streamed directly to the IdeasX system through Wi-Fi. Future devices may utilize lower power technology such as 802.15 or BLE.
Actuator – Actuators are devices which can be controlled by encoders. Actuators can be any device which can connect to the IdeasX system and has a list of commands for actuating that device. (Yes, you can make an encoder an actuator.)
There is quite a few actuators underdevelopment.
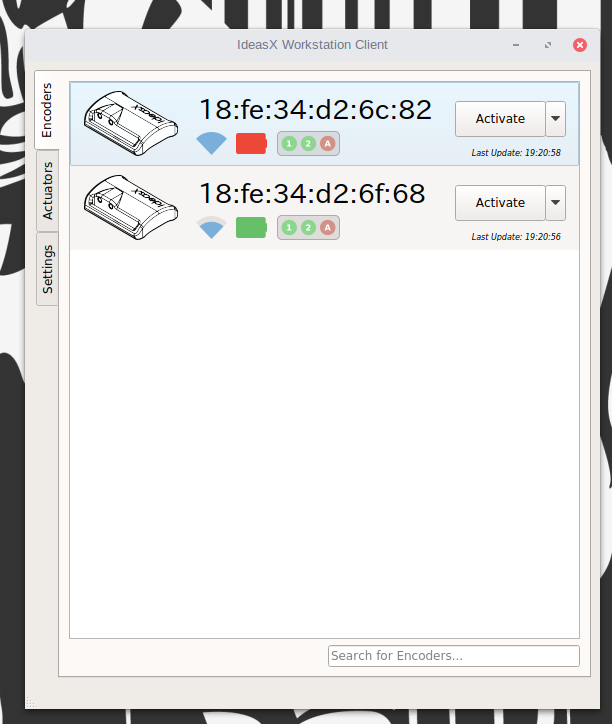
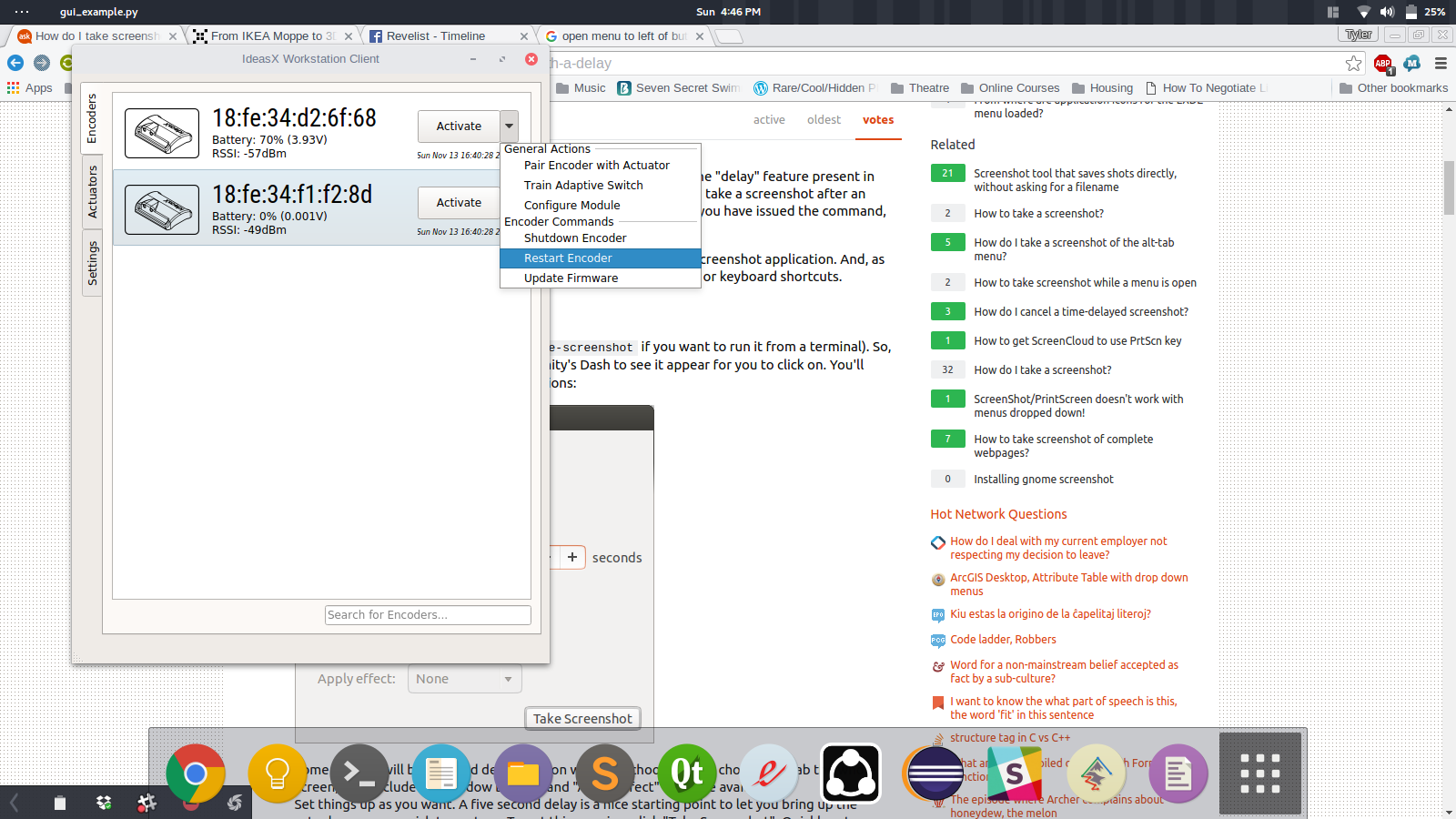
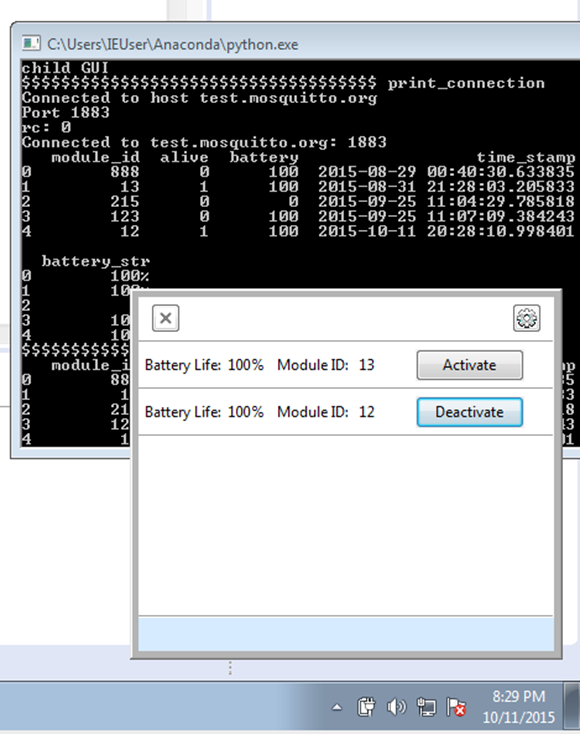
Workstation Client – A piece of software which allows encoders to send keystrokes, touches, and mouse clicks to any computer / smart device installed. It is specifically designed to interface with existing accessibility software. It also provides dialogs for automated pairing of encoders and actuators, lists of the active encoders in an institution / network, and dialogs for configuring encoders in the network.
iRobot – The iRobot Roomba is an amazing piece of technology which can do a lot more good than just cleaning your floors! iRobot provides a low-cost robotics platform called the Create based on the latest commercial Roomba. The Create provides access to the robot’s sensors and routines through a interface port. Undergraduate Temple students are currently designing a low-cost, plug and play kit which enables the Create to connect to the IdeasX system permitting the robot to be remotely controlled. This will provide opportunities to chair bounded students and users to interact spatially in the world.
Wi-Fi Outlet – One powerful teaching tool utilized by therapists is called the Power Link 4 which is basically an adjustable relay. The Power Link allows a binary sensor to active a wall-powered device. The Power Link can be setup to be latching, or latched for a period of time. The tool is often used to help formulate a cause and reaction relationship between the sensor and world for the user (Hey! I pressed this and this wall lamp turned on? This is cool.) Unfortunately, despite being a rather simplistic device the Power Link retails for over 200 US dollars. Luckily, for IdeasX there is already an abundance of devices which can emulate the role of the Power Link and more, are cheaper, and the only thing that stands in way is software!
Supervisor – Supervisors are devices loaded with management software for the IdeasX system. The software can exist as an app for smart devices, a web interface, or a native application of OSX, Windows and Linux. The role of software is to permit therapist to configure every aspect of the system and the devices in it.
Briefly, the purpose of the Supervisors include the following:
- Listing active Encoders and Actuators in the IdeasX System
- Pairing Encoders with Actuators
- Storing Wi-Fi and Network parameters in Encoders and Actuators
- Modification of Encoder sensitivity and Actuator functionality
- Configuring Encoders for gesture recognition
Development thus far was originally a WX application for the Workstation Client. We were on a horrible deadline and the developer really worked magic to make it happen.
I’ve recently been porting this to Qt which, if I may say so myself, looks amazingly less horrible, but still a bit horrible.